Project Details
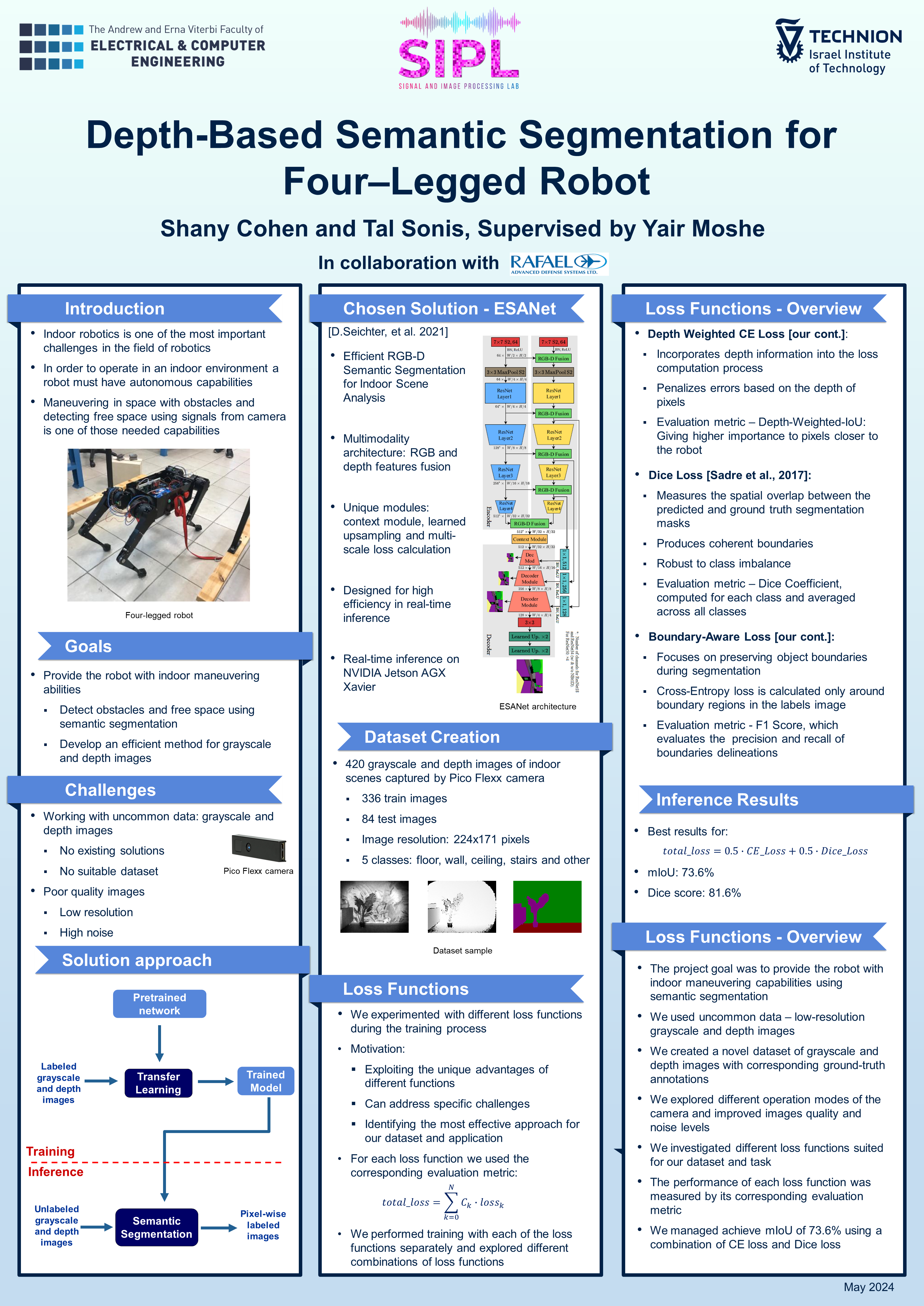
Project DetailsThis work’s goal is to enable maneuvering abilities for a four-legged robot in an indoor environment by employing semantic segmentation. The segmentation is performed using deep learning, based on low-resolution grayscale and depth images captured by a Pico Flexx camera mounted atop the robot. While most existing semantic segmentation methods rely on RGB and depth images, there are no pre-trained models specifically designed for grayscale images. In the project, we adapted an architecture intended for semantic segmentation using RGB and depth images, leveraging transfer learning to tailor it to our specific requirements. Building upon project A, where we created a dataset of labeled grayscale and depth images on which we trained the network, achieving promising results of 70% mIoU (mean Intersection over Union), this project aims to further enhance the performance. We have constructed a correct and extended dataset and achieved similar results to those of project A. Additionally, we explored various loss functions and evaluation metrics better suited for our dataset and task. Through these improvements, we succeeded in improving the network's performance, attaining a 73.6% mIoU.