Project Details
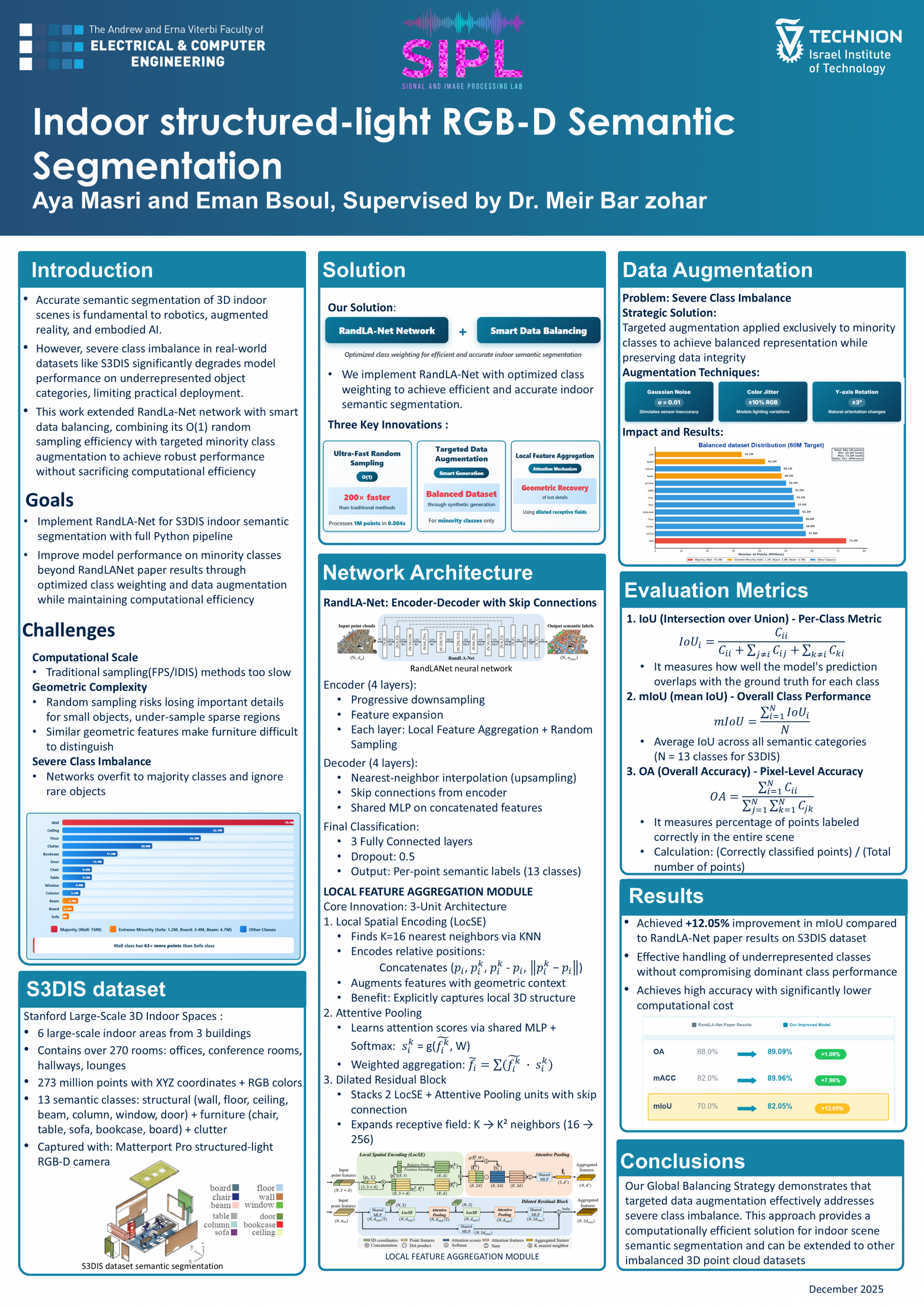
Project DetailsSemantic segmentation of indoor 3D scenes is essential for applications in robotics and augmented reality, yet severe class imbalance in datasets such as S3DIS degrades performance on underrepresented objects. This project implemented a RandLA-Net–based semantic segmentation pipeline for the S3DIS RGB-D dataset, including data preparation, preprocessing, training, and evaluation in Python. To address extreme class imbalance, where majority classes account for ~65% of points and minority classes less than 2% each, we introduced a global balancing strategy using targeted data augmentation applied only to minority classes. The proposed approach improved mean Intersection over Union (mIoU) by 12.05% over the original RandLA-Net results (82.05% vs. 70.0%) while preserving performance on dominant classes and maintaining low computational cost. These results demonstrate that targeted data augmentation can effectively mitigate class imbalance in 3D point cloud segmentation without modifying network architecture.