Project Details
Project Details Award: Schwartz award
Award: Schwartz award
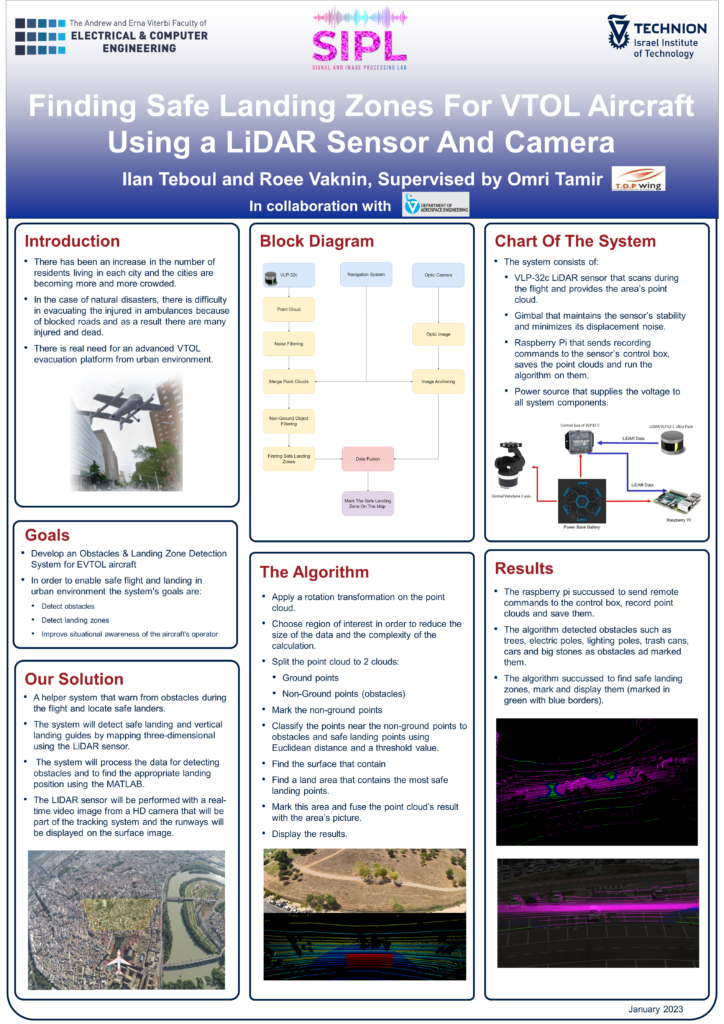
In cases of natural disasters or during war, many casualties are expected in urban areas, many roads may be blocked and the access to wounded on roads will be almost impossible. The initial medical assistance for the victims and hospital evacuation is carried out today mainly by ambulances or helicopters on special occasions.
This challenge raises the need for aerial aircraft to have vertical landing and takeoff capability (VTOL), improvised landing surfaces (no route required), and minimal environmental risk. The aerial vehicle will be able to evacuate the victims to nearby hospitals safely and after providing initial assistance in the field. As part of the project, led by the Faculty of Aeronautics and several other faculties, an aerial vehicle will be designed to evacuate wounded named Savior and will build prototype on a scale of 1:3.
The purpose of our project is to develop a helper system for locating landers in the urban disaster area. The system will detect safe landing and vertical landing guides by mapping three-dimensional using the LiDAR sensor, processing the data for detecting obstacles, and using the MATLAB algorithm and processing to find the appropriate landing position. The LIDAR sensor will be performed with a real-time video image from a HD camera that will be part of the tracking system and the runways will be displayed on the surface image. Information will be transmitted to a ground station if necessary. The goal is to install the system in the prototype of the Savior aerial vehicle as far as the prototype construction schedules will allow.