Project Details
Project Details Award: Wilk award
Award: Wilk award
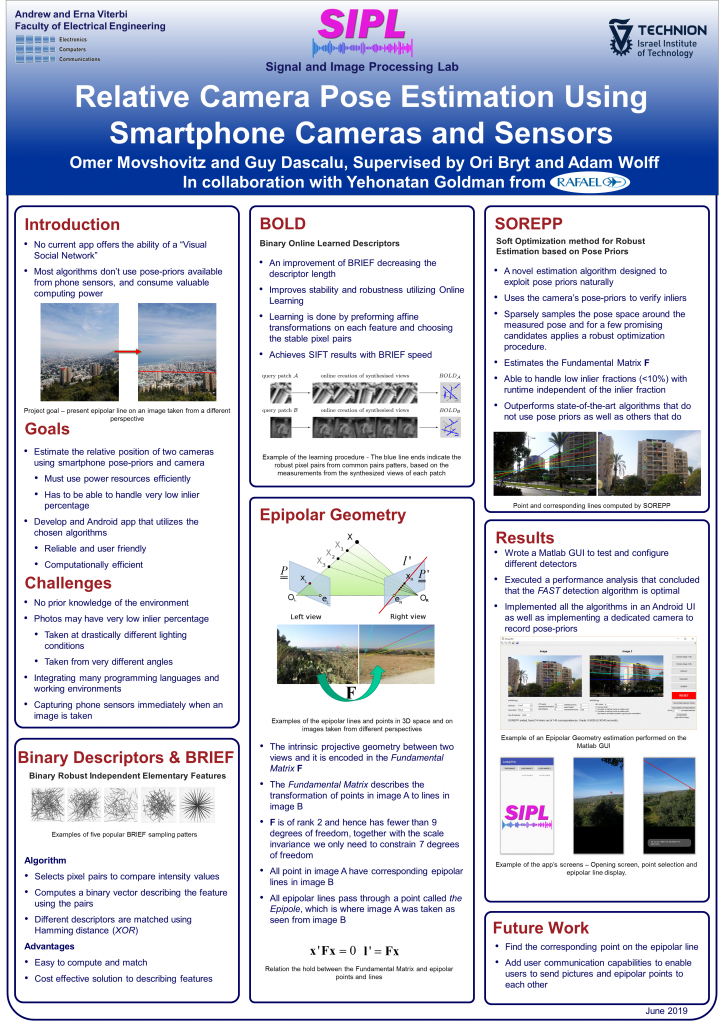
During communication between two people who are located at a distance from each other, often arises the need to indicate a point of interest in the individuals shared field of view. Such a situation causes a problem since it is not always possible to describe where the point of interest is in the other persons field of view, since they see the scene from a different perspective. For example, when describing a window on a building or a rock in a forest, one must use the surrounding environment in order to convey the location of the point of interest, which creates a communication barrier.
In this project, we surveyed the possibility of creating the basis of a Visual Social Network. The goal of the project is to write an Android application which allows two users to transmit information about interest points in a scene, with each user viewing the scene from a different perspective.
In order to compare the performance of different algorithms, we built a MATLAB testing environment and ran simulations that helped us choose the best fitting algorithms.
The uniqueness of the application developed during this project is its use of an Epipolar Geometry Estimator called SOREPP, which uses the images pose-priors from the smartphone that took it (GPS, accelerometer, magnetometer), together with a computationally efficient binary Descriptor and an optimal feature Detector, all of which help to overcome the limited resources that are available on modern smartphones.
In the end, we succeeded in writing an Android application which performs the whole procedure end-to-end, after thorough performance analysis and optimal algorithms selection.
The results given by the application show the epipolar line created using the geometry estimated by the Epipolar Geometry estimation algorithm.