Project Details
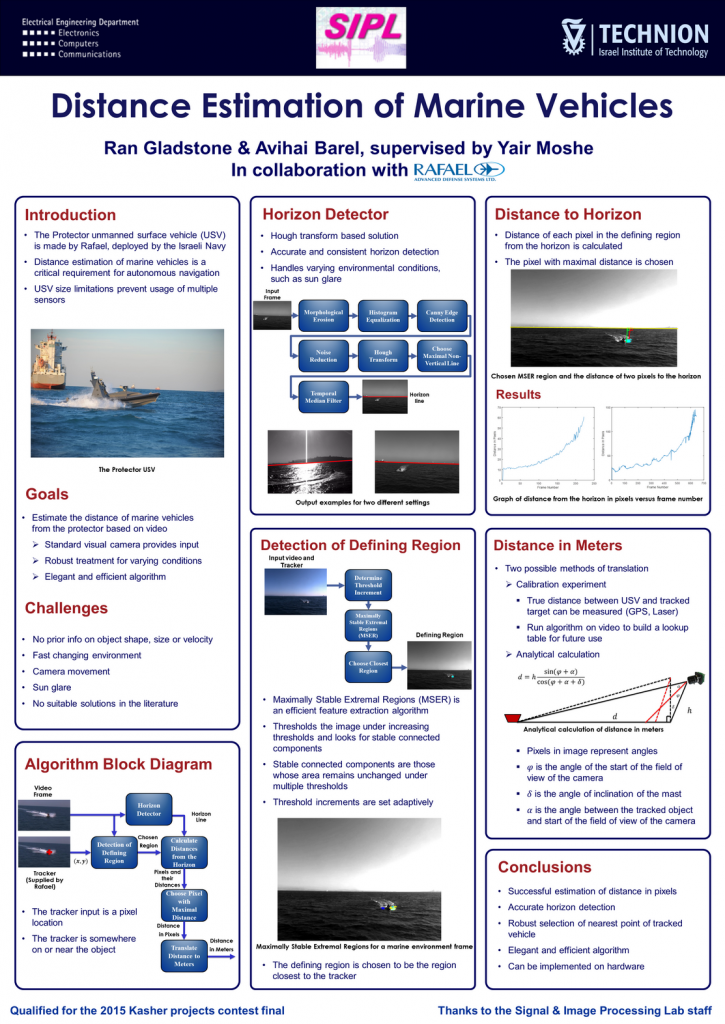
Project DetailsThis projects goal is estimation of the distance of floating objects, such as boats and personal water craft (water scooters) from a video of maritime environment for the Protector USV, which is a product of Rafael. We propose a novel and efficient algorithm to achieve this goal. The algorithm receives as input a video of a marine environment. In addition, the algorithm receives as input for every video frame the location of a pixel that is on or near the object of interest, which we want to estimate the distance to. For every video frame, the algorithm identifies the horizon line, which we take as a reference point whose distance from the camera can be calculated according to environmental conditions. The algorithm proceeds to identify the contour of the object or its wake and choose the point whose distance is the farthest from the horizon line. We show that this distance, measured in pixels, can be translated to distance in meters according to environmental conditions, height of the CCD camera and its specification. The algorithm has been tested on a number of videos of marine environments taken at various environmental conditions and with different floating objects.